
Clockmaking: 2
Well, I finished building my ROKR kit clock, and it works. Fully wound-up it runs for about 5-6 hours before friction defeats it. It makes a pleasantly organic tick-tock sound that I'm now addicted to. Makes me feel a bit like a GOD who created LIFE out of lifeless bits of matter! 😎😇.
It strikes me (heh!) that the default identity of a clock should be the signal it generates, translated to a sound or flow, rather than what it looks like physically. So I am going to lead with a tick-tock sound clip, the hello world of this clock...
hello world dot clock
I highly recommend this kit if you are in a mood to grok the headspace of the early scientific revolution circa 1600-1660, between Galileo and Huygens. Having built this clock, suddenly the Big Mood of that era feels a lot clearer.
I'm going to walk through the highlights of the build in this post, mainly with an eye to interesting appreciative reflections, but I'll also share a few frustration-avoidance tips for those who might want to actually build this kit. While I was tweeting about this, a few people mentioned they'd bought and abandoned this kit halfway, or built it but failed to get it running, which is a pity, since it is a very satisfying build.
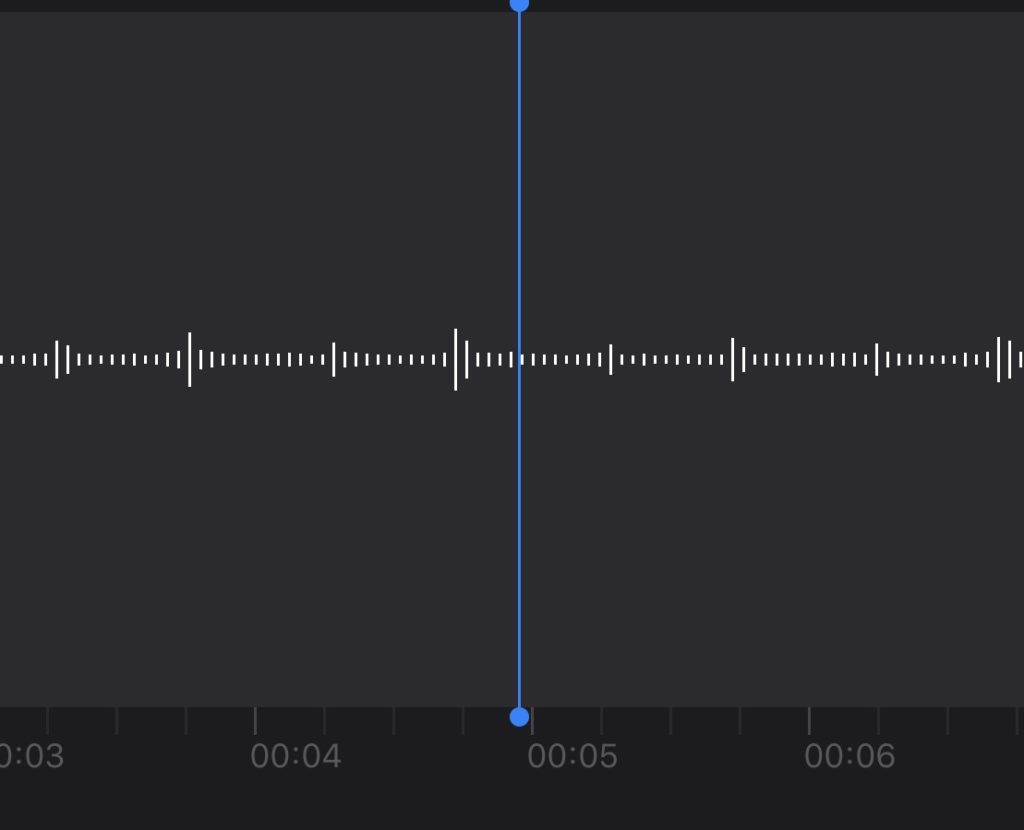
Here's the wave form of the tick-tock (notice the slight irregularities and the clear difference between the tick and the tock)...
And finally here's a short 10s clip of the visuals, with a bit of a close-up of the innards...
Getting to Tick-Tock
I now get why it's tick-tock as the onomatopoeic phrase for the sound of a mechanical clock, rather than tick-tick. There really is a difference in the sound the pendulum makes on the forward versus reverse swing arcs, because different things are happening. There is an irreversibility linked to friction at the very heart of pendulum clocks. The tick is an edge sliding against a surface. The tock is the sudden impact of an edge landing on a surface. Mechanically, a tick is an escape event, while a tock is a capture event. This will make sense later when I explain the idea of an escapement, the core a mechanical clock.
I just want to flag the word here since I get a real kick out of the idea that a tiny little "escape" is built into the very deepest structure of our experience of time, and the broader philosophy of time I'm working on has escape as a central notion.
Building the clock and getting it running took more time, attention, and careful effort than I thought it would. And was more philosophically illuminating than I expected it to be.
Let's run through the build.
Sub-Assemblies
As I explained in Part 1, the kit consists of laser-cut wood laminate sheets that you have to pop out and assemble. The main action is in a set of 8 gears in a train that gears down the ~1 second pendulum to minutes and hours. Here are 7 of them, assembled. Each takes a few sandwiched sheets pinned together with a steel shaft and a couple of yellow plastic sleeves used to position each gear correctly in the frame.

The left-most solid-faced gear is the engine. It has a ratchet inside, which is not visible in this view, but I showed the innards last time from before it was fully put together. I'm repeating that picture below.

See that little slot at the end of the steel shaft? That's where the mainspring will eventually attach. The winding key attaches to the other end of this shaft. Those arrow markings are a nice reminder of the irreversibility being wrangled here.
This ratchet is one end of the irreversibility chain.
TIP: There are eight gear subassemblies, and these are a bit tedious to assemble, but if you build this, do this part carefully since errors will cost you later. Avoid excessive forces that might warp the shafts.
The kit comes with a few bits of tooling that themselves have to be assembled from laser-cut wood pieces, so that feels kinda nicely pure-paradigm bootstrappy. A light mallet (not a hammer) might help for some steps, but otherwise all you need is a hard surface for assembly/push-fit operations.
The ruler looking thing with a hole in the middle and a notch on one end is how you get the sleeves to the right positions on the axles (4mm from the ends generally). The two little doodads are to hold the axles while you position the sleeves to the right depths on the shafts.

After the first couple of gears, it became clear that it would save a lot of headaches to sort the zillion little parts into baggies by their alphanumeric labels, which correspond to subassemblies. That way it's easier to put the kit away and build it over multiple short sessions.
TIP: I highly recommend you do this mise en place step of bagging parts if you decide to build this. Here's my set of bags for smaller parts about halfway through.

Final Assembly
Once you have the gears built, you build the frame.
There are a lot of fancy design flourishes here, but most of them are non-functional, so the clock looks more complex than it actually is. The teeth on the frame circle on the lower right for example, aren't actually part of any gear train. The functional part of the frame is all those holes. That's where all the gear shaft ends will go.
The bottom left here is the clock-face subassembly with the terminal gears driving the hands already in place. That's where the show ends with a time display.

The clock face has the hour and minute hands on different dials by the way. So that's an interesting two-dial design. I think they did it that way to make the gear train more legible, and also simplify it mechanically.

A word of warning about delicate parts.
Most of the parts are from the large A4 sized sheets, 4mm thick and fairly robust while you're popping and pinning. They're unlikely to break. But one smaller sheet (about as big as a phone) has thinner parts, about 2mm thick, which are very delicate. These are wooden pins/struts that hold the frame together via press-fit joints (basically you shove thin matchstick-sized pieces into holes). These break very easily (this sheet also has a bunch of leveling feet that are not as critical -- I'm not using them).
I broke 3 of the strut-pins while assembling the frame. Luckily there's spares on the sheet, but even then, in one case I broke both the main and the spare, and haven't yet glued it in place properly :( So...
TIP: Be extra careful when assembling the frame with the very small struts (F-labeled parts) on the thin, small phone-sized sheet.
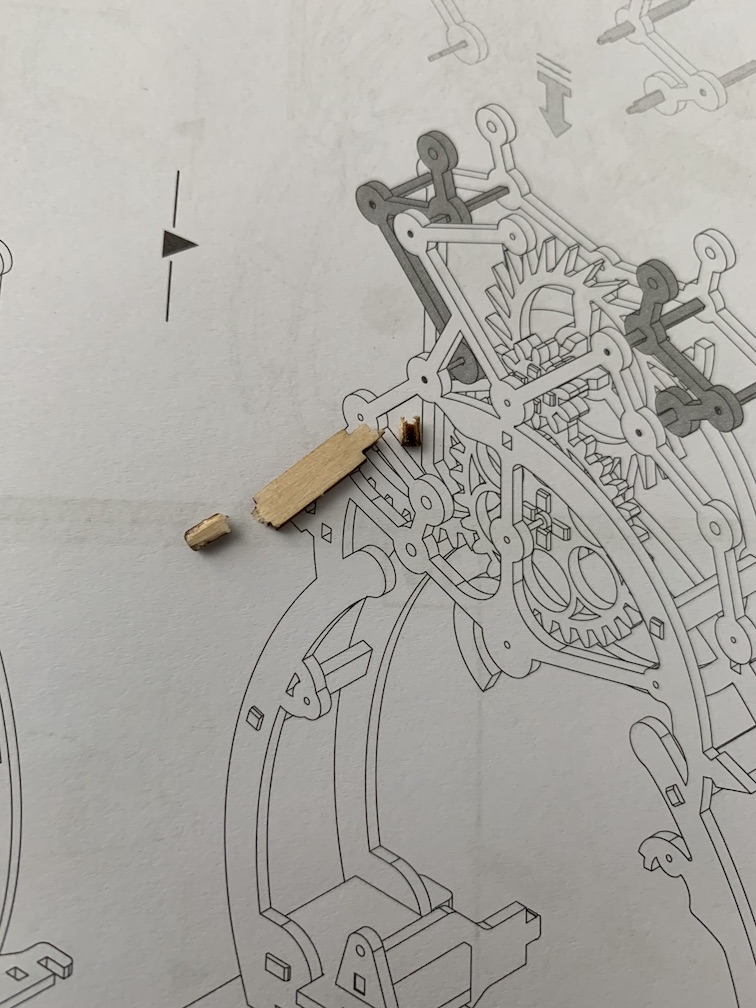
Shaded part is where the thin strut goes.

Broke while press-fitting it.
The final assembly is slightly awkward, since you have to maneuver and mount the gears precisely in the right locations, and make sure previously mounted ones don't fall out. For a couple of tricky bits, the company has provided helpful videos online. But it's not difficult, just awkward.
There's nothing holding the gears in place -- just shaft ends in holes. They easily fall out during assembly. But once you have them all in, they stay in place fairly solidly. You can then wind up the mainspring, jam a pencil in the gear-train, take out the pendulum, and then remove the pencil to watch the gear-train run, with the spring unwinding at its natural rate.
This step is not just fun to watch, it's a necessary test before you work on getting the pendulum mechanism right.
If the gear train runs smoothly and unwinds in like 15-20 seconds with the mainspring fully wound, you've got the basic trial assembly done right. If gears keep falling out, you need to work on that.
Tick-Tock Theory
Next comes the actually hard part of this project. Getting the damn thing to run continuously until the spring is spent.
The way a pendulum clock works is this: the gear train is under a positive potential drive force from the wound mainspring, and as the video clip above shows, without the pendulum regulating it, it will just go brrr until it releases all the energy. The inertial load on this particular mainspring lets it free-run for about 15-20 seconds when fully wound. Without the pendulum part, a mechanical clock is like a wind-up clockwork toy car.
What the pendulum does, via what's known as an escapement mechanism, is regulate the unwinding to a particular rate set by the natural time constant of the pendulum, which, if you recall from high-school physics, is:
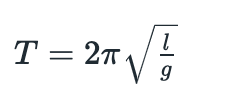
where l is the length of the pendulum, in this case about 25cm, and g is acceleration due to gravity (9.8 m/s²) for a 1s period. The design of escapements was the main focus of the early development of clocks. If ratchets are one end -- the potential end -- of a the irreversibility chain, escapements are the other end -- the kinetic end. At one end, the spring-loaded ratchet unwinds steadily in one direction. At the other end, the escapement repeatedly catches and releases the gear-train with the help of the pendulum and the asymmetric-toothed escape wheel.
In the case of this ROKR clock, we have what's known as an anchor escapement, illustrated in this gif (wikimedia commons):
The rocker (I think that's what it's called -- the anchor-shaped part on top, though it might be called the pallet -- terminology is a bit confusing but not that important) attached to the pendulum lightly resists the unwinding with the leading edge tooth. Remember this is at the end of a high-ratio gear train from the main spring, with a big reduction between escape wheel and mainspring, so a very light force is enough. Without the pendulum, the escapement is the fastest spinning gear in this train.
The gear train generates just slightly more force than gravity so the tooth "escapes," giving the pendulum a little impulse in the process, but then the trailing tooth of the rocker arrests the motion long enough for the leading tooth to catch again. This happens at the natural frequency of the pendulum. The escape wheel is like a parent pushing a child on a swing. The tick is the push, the tock is the capture. One is smoother than the other, hence the asymmetric sound.
This is not that complex though it's a bit befuddling to look at. It's just a more complex version of shoving a stiff piece of cardboard into a spinning wheel. The cardboard will be pushed back by each spoke, and snap back to hit the next one, creating an intermittent braking action (kinda like anti-lock brakes now that I think of it). Any natural oscillator can serve this function in an appropriate intermittent contact design. So escapements are conceptually simple, and many things could potentially work in that role. But they require careful design to be actually useful.
That's the theory. Except the first time I tried, the clock ran for barely 10 seconds before stopping.😖
Is it a leveling problem? 🧐
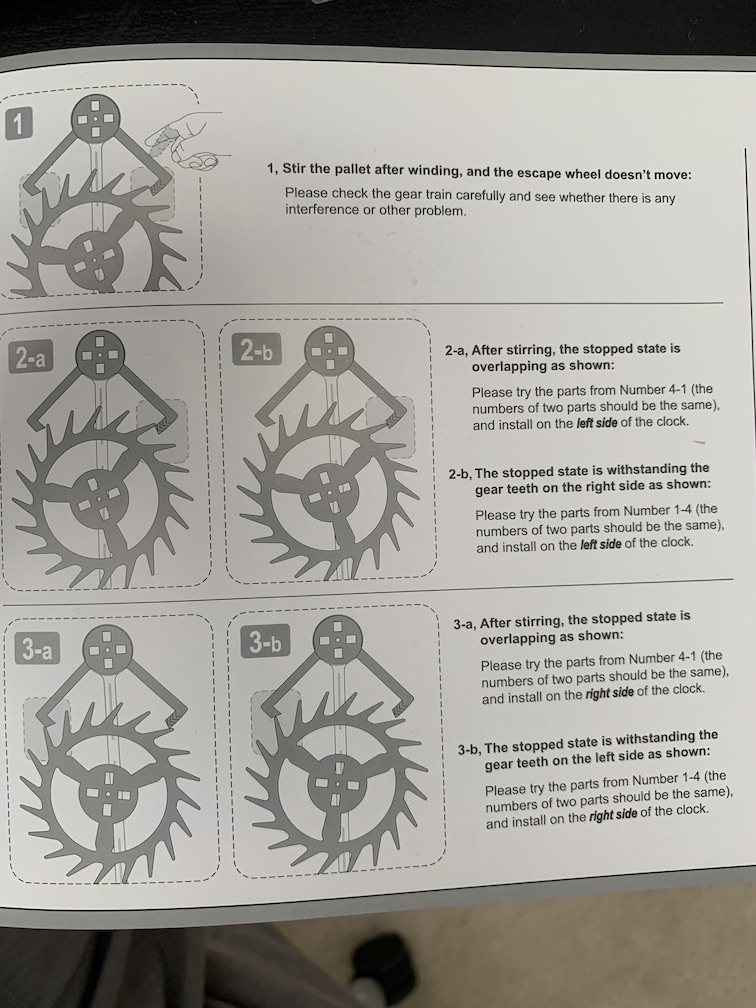
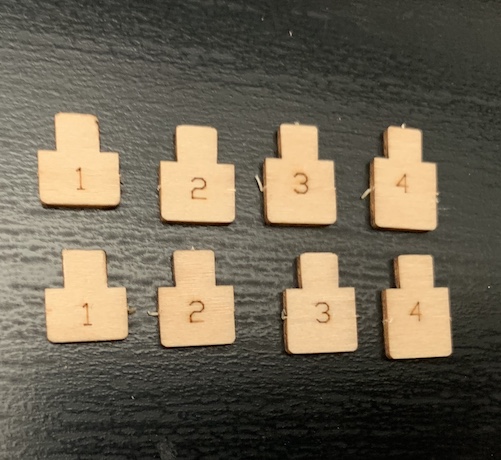
Initially, I thought it was a leveling problem, since that's the only kind of troubleshooting the manual explains:
So I spent a silly amount of time getting the clock exactly level. The leveling feet that came with the clock were way too big (a suspicious fact that should have tipped me off, but didn't).
By making a series of fine adjustments, with very thin sheets of paper under the feet, I got the clock ticking for up to 50 seconds.
A 5x improvement over the initial 10-second run that made me feel pretty good until I realized it was stupid.
I was going to do more precise leveling experiments, by constructing a platform with leveling screws, but then it struck me that this was ridiculous and too fragile for a real clock.
A 17th century invention using low-precision parts could not be this sensitive to leveling. I was solving the wrong problem simply because the manual documented it. Which isn't to say very precise leveling wouldn't be a fun problem to solve...
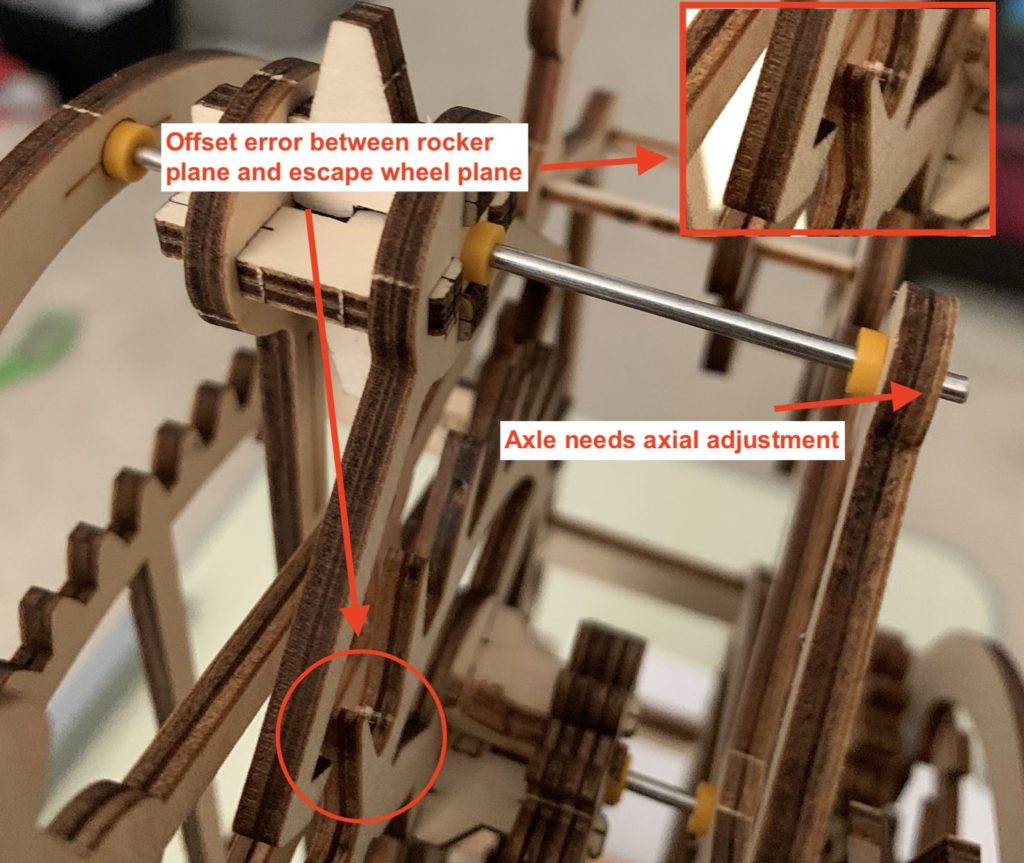
I looked again, and whaddya know, the escape wheel was slightly out of alignment with the rocker 😬 -- the tooth faces were not lined up. That seemed like a more promising thing to troubleshoot.
My Rocker is Off 😎
The rocker and escape wheel should have had a full-width line contact of 4mm, but due to misaligned assembly, it was like 1-2mm.
When I spotted it, I didn't think it could be the problem. I mean, contact is contact, right? Apparently not.
After some finicky adjustments to the axle of the pendulum (moving it about 1-2 millimeters), the clock was running 30-50 minutes! An impressive 50x improvement in run time, from under a minute to almost an hour, by improving one misaligned contact by 2mm.
Precision matters in clockwork, who'd have thunk.
This sketch illustrates the adjustment in case it isn't clear from the photo.
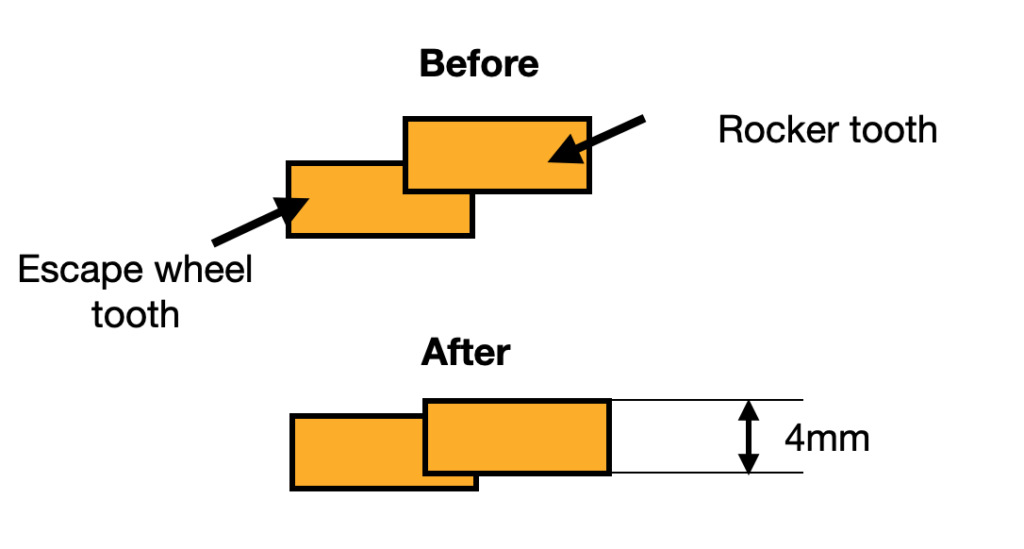
I didn't get it perfectly aligned (tradeoff between the axle falling out of the sleeve and the contact being good), but I got it good enough it was no longer the problem. There's a lesson there in sufficient precision to move move the bottleneck.
But now, the clock was stopping randomly after 30-50 minutes, because one or the other gear down the train kept falling out.
Once I fixed these assembly issues, the gears stopped falling out, but the clock was still stopping after about an hour.
And it wasn't obvious from visual inspection which gear was not generating enough contact force. The randomness of the timing made me suspect that it happened when the spring had wound down enough and was generating too little force to overcome some point of friction (since it's a simple nonlinear spring). It wasn't a particular kinetic state of the gear-train, but a particular energy state of the spring.
So another principle discovered: the clock stops when the next weakest contact point is defeated by the next strongest friction source at a particular energy run-down point.
The bottleneck moves in the direction of the next most fragile balance between force and resistance. So up the gear-train from largest to smallest total ratio point. There's probably an equation for this in some advanced gear textbook.
The Final Sprint
The clock stayed in that one-hour-stalling state for a week or so. I could see some misalignments, but it was not clear which one was stopping the clock. I was reluctant to mess with all of them since it would involve serious disassembly, but eventually I decided to do it. Initially I was going to try and get clever with it by running experiments to try and isolate the bottleneck contact, but then I decided patience was the higher virtue, and simply went for one of the larger visible misalignments, in one of the middle gears. I figured I'd fix them one by one and eventually fix the right one. Luckily the first one turned out to be the right one.
This one was tricky because it wasn't just a single axial misalignment that could be solved by moving the shaft along its length. The shaft itself was slightly off-normal relative to the gear-train plane, like the leaning tower of Pisa due to a botched sub-assembly job.
I took offending the gear out, and tried to get the axle perpendicular to the gear, but unfortunately I had assembled that gear too poorly to undo the skew (hence the importance of precise subassemblies). So rather than do serious surgery, I adjusted it axially as much as I could to get it mesh better with its neighbors. The goal, I decided, was to improve the contact enough to get past the bottleneck, rather than get it geometrically perfect.
It worked. Voila!
The clock ran uninterrupted for 4.5 hours. A 5x improvement. If you are keeping track, at this point I'd gone from 10 seconds to 16,200 seconds.
A 1620x improvement by making two alignment improvements at the critical places.
And not even getting them perfect -- just good enough to move the bottleneck to the next worst alignment. And since the next worst alignment was upstream on the gear train, it meant I won a big jump in performance. One small step for a gear, a giant leap for a gear-train.
Damn precision matters.
For a few minutes I was considering fine-tuning it further to get it to run a full 24 hours, but then I realized from reading the documentation fine print (tipped off by an alert twitter follower who was following my live-tweeting of the troubleshooting) that the clock is not actually designed to run that long. The mainspring has enough juice when fully wound for about 4-6 hours, depending on how tight you wind it.
So I was already at or very near the design endurance. I was done. But if it had been a 24-hour clock, I think one more alignment would have gotten me home, given the order-of-magnitudes improvements trajectory up the gear train.
Escape to Orbit
Once I got the thing running at its design limit, I began wondering where the limit comes from. It you think about it, it's not about spring energy limit per se, but an escapement load limit. In theory, the clock stops when the weakening nonlinear spring force is too small to push the pendulum against gravity. When it is too weak to escape the gravity trap. At that point, the pendulum weight turns into a lock. In practice, it's probably intermediate friction that stops a clock, but the gravity trap is the ultimate design limit.
There's something beautiful about this idea. The clock stops when it is too weak to escape gravity.
Lemme try to rough-estimate this. If the pendulum bob weighs say 20 grams (my estimate), and it needs to be raised a minimum of say 5mm for the escape wheel to skip one tooth, the escape energy is 0.000098 Joules. I haven't worked out all the gear ratios, but eyeballing it, the ratchet wheel (which the mainspring is attached to) seems to be in a 1:1 ratio with the minute hand, which means it unwinds 1/10° per pendulum swing.
With a radius of about 3cm, we need a force of about 1.87N, which is about a 190 gram force. Which is about the weight of an iPhone 11. I probably got something wrong in the math (seems a bit high), or estimates, but I think the logic is correct.
The clock is in a 190 gf gravity well, give or take some math errors. It can stay in a captive orbit while the instantaneous spring force is above that (of course if the spring force is too high, the clock will tear itself apart, so there's an upper limit as well).
It's a bit like a satellite in orbit finally re-entering the atmosphere (in grad school, a friend of mine actually wrote a paper analyzing escapements this way, using what are known as limit cycles to analyze the "orbits").
If all the shafts were perfectly parallel, and all the gears perfectly meshed with only rolling contact and frictionless axles, the gear-train itself would probably be a low inertial load. Each gear accelerates and decelerates up to and down from a maximum velocity with every tick-tock, but the speeds are really low for gears far from the pendulum, and they're all very light. I suspect this mainspring could run a clock with this much inertial loading (from the pendulum to the clock hands) for days under ideal conditions.
So I think the limiting factor is the pendulum raising energy, but I'm probably nowhere near hitting it, due to the misalignments creating intermediate friction-lock energy states. How do I know this? I know because I ran some experiments. After the clocks stops around the 5-hour mark, if I perturb the pendulum ("stir the pallet" is the term of art it seems) again, it runs for ~30 minutes. Then maybe 10 after the second stirring. Then 5, then 1. So there's juice left. It is intermediate friction that stops the clock, not the gravity limit.

A perfect version of this clock, with this spring, could probably run for a full day. And you could extend the spring-force life arbitrarily by making the pendulum lighter and lighter.
Of course, we live in a world of misalignments and frictions, so we never get to that asymptote of eternal ticking with infinitesimal energy.
Lessons
So what did we learn. Well, apart from a whole lot of lessons about the temperamental features of laser-cut wooden parts, and sketchy philosophical lessons about escapes and dubious analogies to orbital mechanics?
The lessons relevant to actual clock-making and the philosophy thereof:
- Irreversible subassemblies need to be precise. You can't fix them later easily, and they cause leveraged trouble.
- Premature assembly precision is pointless. You're going to have to fine tune. Get things good enough for a trial assembly.
- If it's too hard, you're likely working on the wrong thing. While I was thinking the problem was the leveling, I was sweating very precise leveling experiments to go from 50 seconds to 55 seconds, a 10% improvement. Once I switched to alignment as the bottleneck problem, I jumped 50x.
- You have to understand the working principle to troubleshoot efficiently. Until I did the free-running experiment, I hadn't actually quite understood how the escapement worked. But once I got it, the main troubleshooting principle became clear: work up the gear-train from the least-loaded to most-loaded gear.
- If things are super-fragile and sensitive, they aren't actually working. Unless you're building a bleeding-edge instrument like a gravity-wave detector, things that work at all tend to work robustly. Pendulum clocks are ~400 years old. If there's a fragility problem, you're doing something wrong. It's not a design issue.
- Friction, inertia, leverage, mechanical advantage -- these things impose a natural but not obvious priority order based on emergent bottleneck sensitivity. Start with the logically biggest sensitivities. So a misalignment in the escape wheel is hyper-sensitive since it's dealing with the smallest forces. Work up the gear train from that. By the time you're at the hour hand, much stronger brute forces are at work. It'll punch through fairly coarse alignments and frictions.
All in all, an enlightening first clock-building experiment. I'm now scouting around for my next one, which will likely be electronic.
5 Comments
I’ve enjoyed both of these write up.
https://www.instructables.com/Mechanical-Digital-Steel-Ball-Clock/ - this is on my project list. A mix between physical and electronic.
I want to make one of these:
- http://www.leapsecond.com/pend/clockb/
- https://quillandpad.com/2017/07/28/burgess-clock-b-worlds-precise-pendulum-clock-made-250-year-old-design-john-harrison-longitude-prize-winner-inventor-marine-chronometer/
Really terrific article as usual Venkat. Particularly enjoyed the insights about priority ordering of bottlenecks / weakest contact point vs. strongest friction / thinking about decreasing forces as you get close to the escape wheel! Plus, that "anchor" ratchet combined with the natural, amplitude independent period of the pendulum is just such a beautiful idea :)
Brilliant illustration of how learning by doing can be way more effective than learning just theory, especially if you know some theory already! Inspiring.
Pendulum Clocks Are So Cool! My Grandfather Built A Beautiful Grandfather Clock From A Kit We Got In Florida, Forget The Name Of The Company...Had The Phases Of The Moon, The Sun Showed Up During The Day, Etc...It Was Accurate...Even He Was Impressed